InFRARED SEEKING rOBOT
Course Project
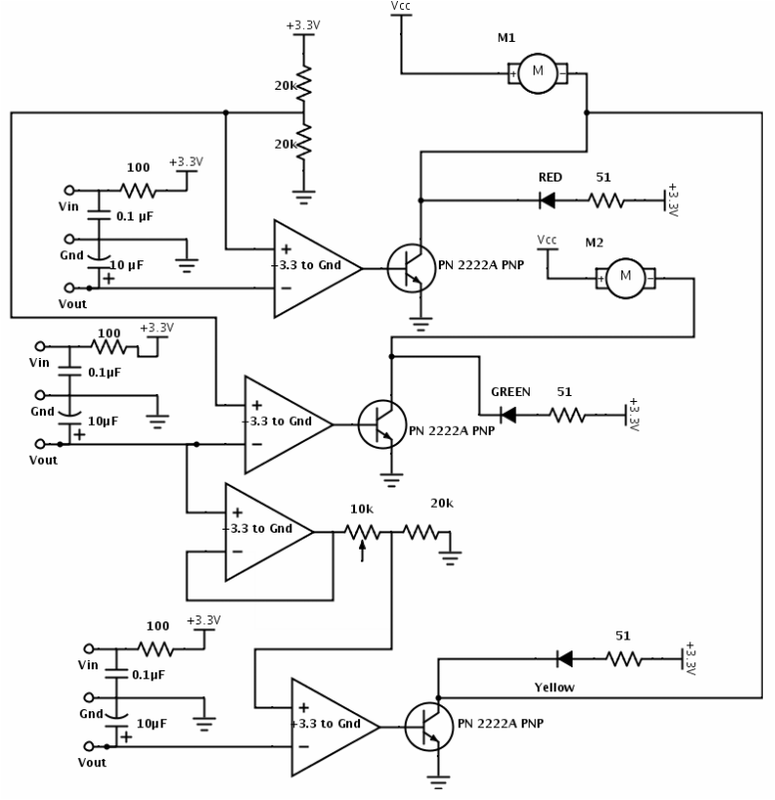
This project was a requirement for my analog circuits class at UC Berkeley. We were required to build a robot that performed a specific function using analog circuits. I built an analog circuit that senses IR signal and drives a robot toward the IR source. There is no microcontroller on the robot. The robot has multiple IR receiver modules and all of the logic is implemented by analog components in the circuit. The circuit also filters out any redundant or ambient IR frequencies so the robot can track without distractions. To control the robot my partner made an IR emitter beacon that sends a frequency that the robot will follow. This beacon can also be sound activated. When It hears noise, it tells the robot to come closer. Below is a diagram of the circuit I designed as well as a video of the robot.
Technical Skills learned |
Collaborators |
|
|